|
《靜止無功補(bǔ)償器的模糊神經(jīng)元PID電壓控制》
周曉華1 , 劉勝永1, 王荔芳2, 李振1, 張銀1
1. 廣西科技大學(xué)電氣與信息工程學(xué)院 ,廣西 柳州 545006 ;2. 昆明學(xué)院自動(dòng)控制與機(jī)械工程學(xué)院 , 云南 昆明 650214
摘要:針對(duì)傳統(tǒng)PID控制應(yīng)用于靜止無功補(bǔ)償器電壓控制系統(tǒng)所體現(xiàn)出的快速性與穩(wěn)定性之間的矛盾
關(guān)鍵詞:靜止無功補(bǔ)償器(SVG);模糊控制
0 引言
靜止無功補(bǔ)償器(static var compensator,SVC)通過吸收或向電網(wǎng)輸送可連續(xù)調(diào)節(jié)的無功功率
傳統(tǒng)PID具有廣泛的適用性,控制器結(jié)構(gòu)簡(jiǎn)單
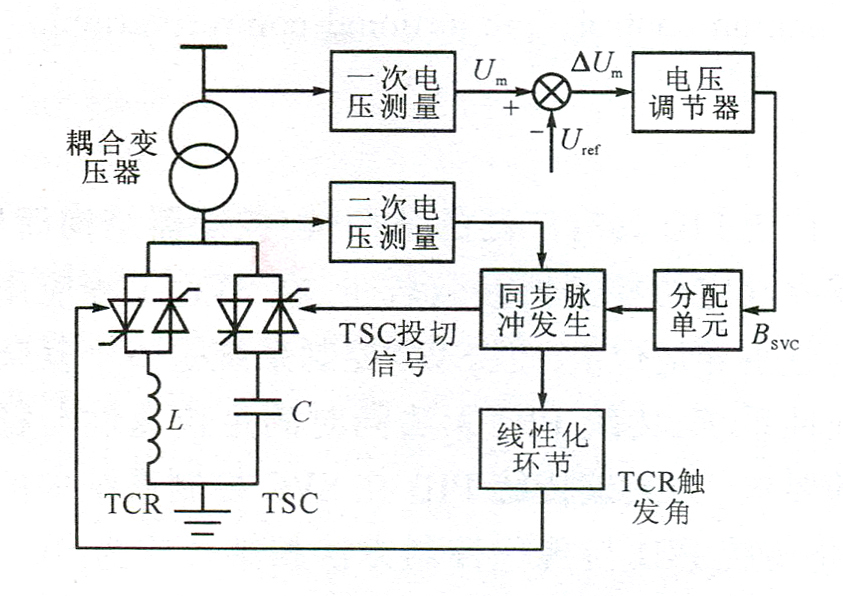
1 SVC基本原理
由晶閘管投切電容器(TSC)和晶閘管控制電抗器(TCR)構(gòu)成的TSC+TCR組合型SVC,具有較好的輸出特性和損耗特性112],是目前應(yīng)用較為廣泛的靜止無功補(bǔ)償裝置
圖1 SVC控制系統(tǒng)原理框圖
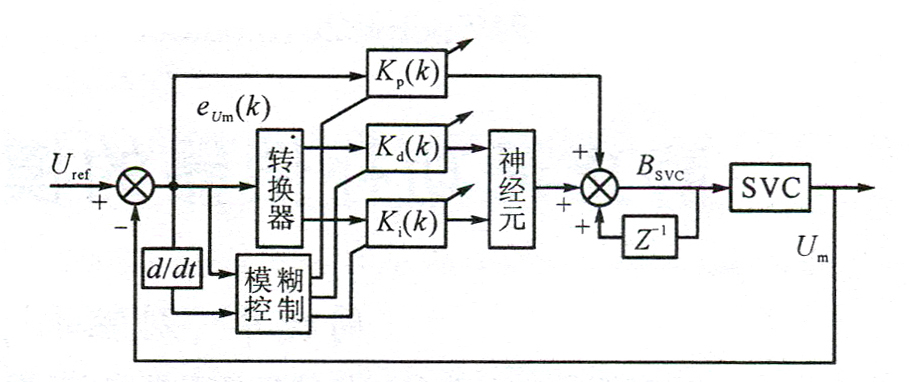
2 模糊神經(jīng)元PID電壓調(diào)節(jié)器設(shè)計(jì)
模糊神經(jīng)元PID電壓調(diào)節(jié)器結(jié)構(gòu)框圖如圖2所示
圖2 模糊神經(jīng)元PID電壓調(diào)節(jié)器結(jié)構(gòu)框圖
取神經(jīng)元的2個(gè)輸入狀態(tài)為
式中:Kd(K)為K時(shí)刻的微分系數(shù);KI(K)為K時(shí)刻的積分系數(shù)
設(shè)α(K)為K時(shí)刻Ki(K)和Kd(K)的調(diào)整系數(shù)
式中W1(K)
神經(jīng)元權(quán)值的調(diào)整算法為
式中ηi(i=1,2)為神經(jīng)元的學(xué)習(xí)速率。
神經(jīng)元變結(jié)構(gòu)PID控制器的增量式控制量為
式中:Kp(K)為K時(shí)刻的比例系數(shù);BSVC(K-1)為神經(jīng)元變結(jié)構(gòu)PID控制器在K-1時(shí)刻的控制量:K為神經(jīng)元的比例增值
由式(4)可知,根據(jù)誤差大小,神經(jīng)元變結(jié)構(gòu)PID控制器通過調(diào)整a(后)的值以權(quán)衡微分、積分環(huán)節(jié)的控制作用,實(shí)現(xiàn)了變結(jié)構(gòu)PID控制,變結(jié)構(gòu)PID控制器參數(shù)設(shè)置與文獻(xiàn)相同。
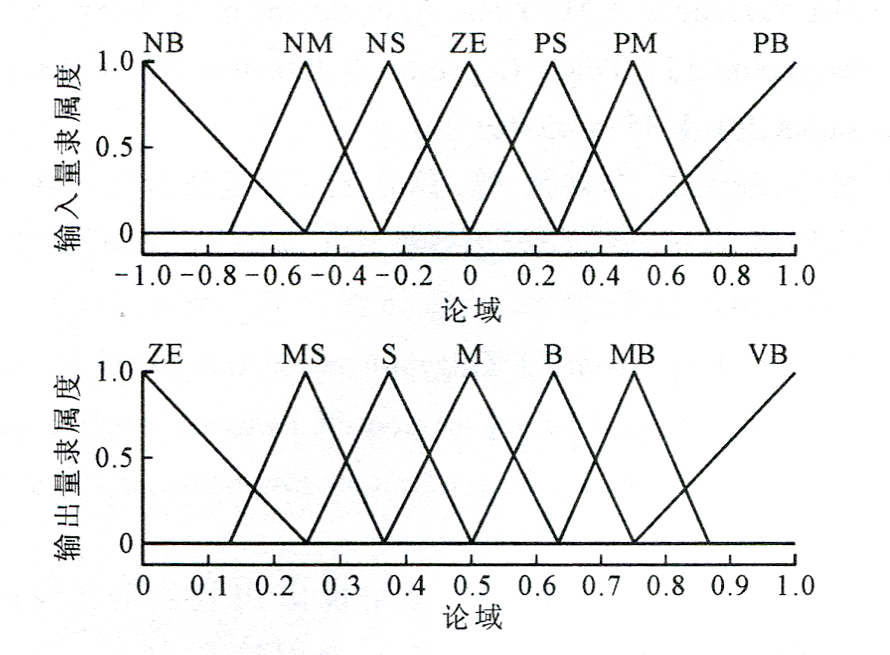
神經(jīng)元變結(jié)構(gòu)PID控制器參數(shù)Kp(K)、Kd(K)和Ki(K)采用模糊控制在線自動(dòng)調(diào)整
式中KP0、Kd0和Ki0為傳統(tǒng)PID控制器參數(shù)值。
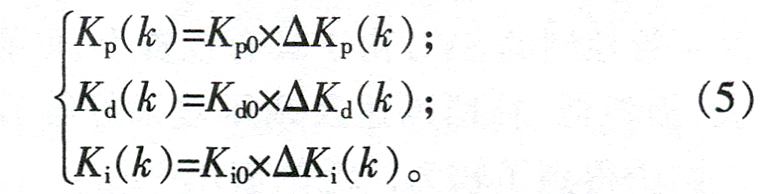
模糊控制器輸入量基本論域定義為(一1,1),模糊子集定義為{NB,NM,NS,ZE,PS,PM,PB),分別代表{負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大}
圖3 各模糊量的隸屬度函數(shù)
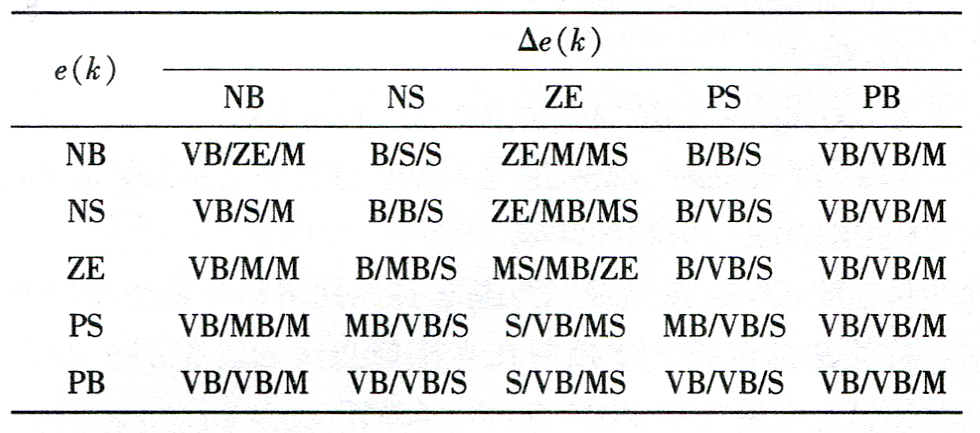
模糊推理采用Mamdani規(guī)則,輸出變量△Kp(K)、△Ki(K)和△Kd(K)模糊控制規(guī)則見表1。
表1 △Kp(K)、△Ki(K)和△Kd(K)模糊控制規(guī)則表
模糊控制器輸入量化因子Ke=0.1,K△e=0.5,輸出比例因子Ka=6,Kb=0.001,Kc=1。
3 仿真與分析
3.1 SVC仿真模型
為驗(yàn)證本文所設(shè)計(jì)的模糊神經(jīng)元PID電壓調(diào)節(jié)器的可行性和有效性,選擇Matlab電力系統(tǒng)工具箱中的SVC詳細(xì)模型為實(shí)驗(yàn)平臺(tái)進(jìn)行仿真研究。SVC仿真模型采用可編程電壓源作為系統(tǒng)電源,并向系統(tǒng)提供1個(gè)隨時(shí)間變化的電壓以模擬系統(tǒng)電壓的變化情況。用串聯(lián)的RLC支路表示系統(tǒng)負(fù)荷,其有功功率為400 MW,無功功率為0。SVC通過1臺(tái)735 kV/16 kV、333 MVA的耦合變壓器并聯(lián)在負(fù)荷側(cè),SVC由1個(gè)109 Mvar的TCR和3個(gè)94 Mvar的TSC構(gòu)成。
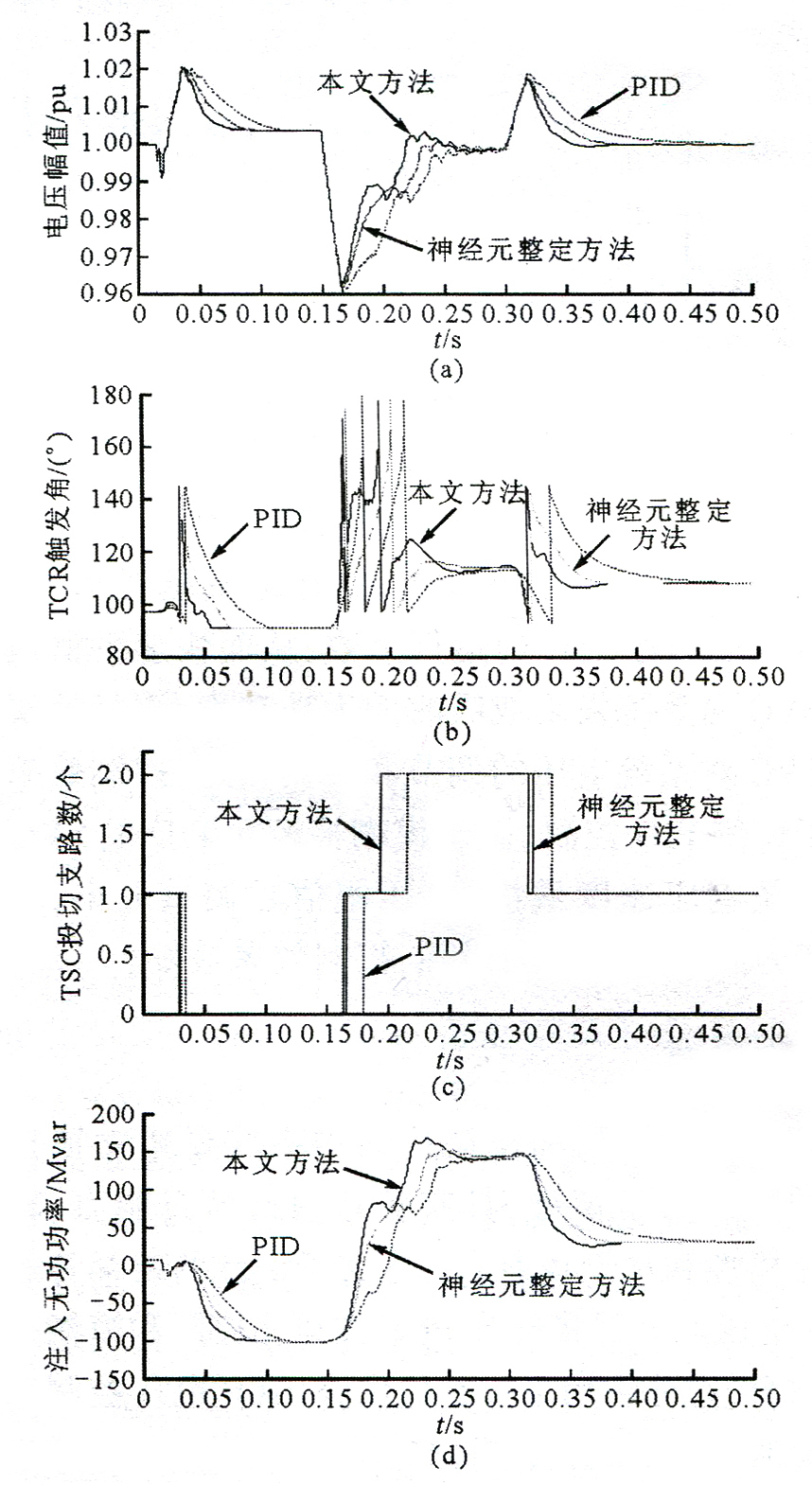
3.2 仿真結(jié)果
t=O時(shí)
圖4 3種電壓調(diào)節(jié)器控制效果對(duì)比
由圖4可知.在t=O時(shí)系統(tǒng)電源電壓幅值為1.0p.u.
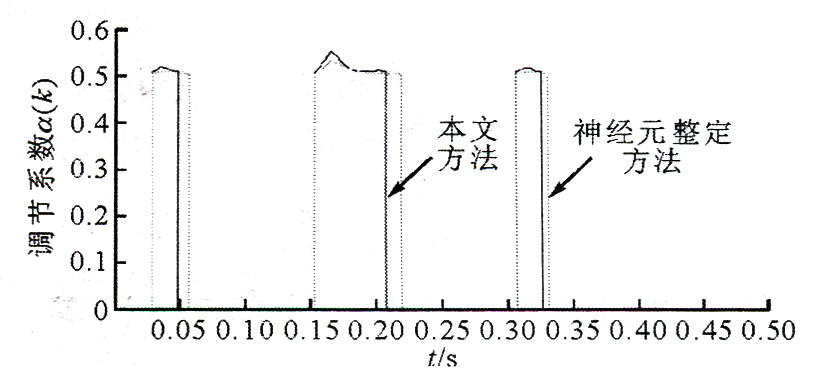
圖5所示為2種變結(jié)構(gòu)PID電壓調(diào)節(jié)器的調(diào)整系數(shù)α(k)變化曲線。在系統(tǒng)電源電壓發(fā)生變化時(shí),控制器通過調(diào)整α(k)的值實(shí)現(xiàn)了變結(jié)構(gòu)控制
圖5 調(diào)整系數(shù)α(K)變化曲線
由仿真結(jié)果可知,2種變結(jié)構(gòu)PID的SVC控制系統(tǒng)均能快速
4 結(jié)束語
神經(jīng)元控制和模糊控制均不需要建立被控對(duì)象的精確數(shù)學(xué)模型 |